
The lungs are one of the most difficult organs for physicians to navigate. They have a dense network of blood vessels, bronchi, and other critical anatomical structures that makes reaching distant lung nodules with a conventional bronchoscope challenging.
To overcome these limitations, researchers at the University of North Carolina at Chapel Hill, Vanderbilt University, and the University of Utah have built a compact robotic system that can autonomously steer a flexible needle around these anatomical obstacles within the lungs of live animals.
“The robotic system is innovative in that it incorporates autonomous navigation steering that enables more precise needle movement through the lungs. Reducing human error could lead to improved patient outcomes,” said Moria Bittmann, Ph.D., a program director in the NIBIB Division of Discovery and Applied Science.
The scientists showed in their preclinical study published in Science Robotics that the robot-steered bronchoscopy needle consistently outperformed a physician-guided bronchoscopy needle in reaching the selected targets. The targeting errors were so small that the robot could be used to biopsy the smallest clinically relevant nodules, said the researchers.
They chose pig lungs for their study because of their similar size and structure to human lungs.
“This is the biggest milestone we’ve reached so far. This robot is the first one that has autonomous needle steering, worked in vivo, and could avoid anatomical obstacles,” said Ron Alterovitz, Ph.D., principal investigator and corresponding author of the study, and a professor of computer science at the University of North Carolina at Chapel Hill.
Designing the robot
The least invasive way to diagnose lung nodules is bronchoscopy, a procedure where a physician navigates an endoscope through the patient’s mouth and through the airways. From there, a straight needle is inserted into the lung tissue to a target site, removing a small sample of the nodule for analysis.
However, current manual bronchoscopy techniques have several limitations. Straight needles aren’t designed to navigate around anatomical obstacles and through lung tissue that moves when people breathe. These barriers have limited biopsies of small nodules or nodules deep within the lungs and further away from the major airways.
“We are trying to target an object the size of a pea that’s moving when the person breathes so it’s like trying to hit a moving target that’s very small,” said Jason Akulian, M.D., study co-author and a pulmonary interventionist at the University of North Carolina at Chapel Hill.
While robot-assisted bronchoscopy has made strides in reaching distant nodules, a physician must still operate the bronchoscope, and current systems do not offer needles that can steer through lung tissue.
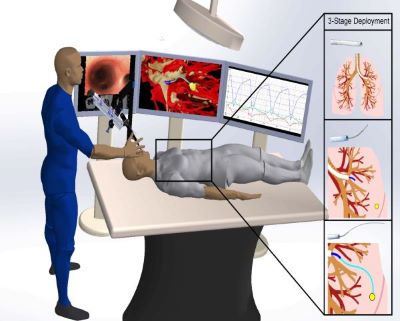
The researchers addressed these limitations when they designed their semi-autonomous robotic system. The system has three stages: the first two require a physician to insert a bronchoscope into the airways and then operate an aiming device (in conjunction with the software) to launch the needle at a desired target in the lungs; the last stage is where the robot autonomously steers the needle to its destination.
The system’s hardware components include flexible laser-patterned needles that curve around anatomical obstacles, a mechanical control of the needle thrusting and turning, and an aiming device.
The system’s software independently operates the needle steering and semi-operates the aiming device. Using a 3D map of the pig’s lungs acquired from a previous computed tomography (CT) scan, it plans the shortest route for the steerable needle to take that safely avoids obstacles such as blood vessels and accounts for respiratory motion caused by the animal’s breathing.
Testing the robot’s performance
The researchers wanted to test how well the autonomous system controlled the needle steering in living, breathing lung tissue, which is more challenging to navigate than deceased lung tissue or phantom lung tissue.
The first set of experiments assessed whether the robot-steered needle accurately followed a preplanned route in the living pig lung tissue. The results from three needle deployments showed the automated steering stuck to the route with only small deviations.
The steerable needle safely avoided anatomical obstacles and reached the targets with an average error of 2.7 millimeters. The smallest nodule physicians will attempt to biopsy is about 8 millimeters in diameter, so the result fell well within the target range of an actual biopsy.
The second set of experiments compared the accuracy of the robot-steered bronchoscopy needle in ex vivo lung tissue with a manual diagnostic bronchoscopy technique. The results of 21 total needle deployments showed that on average, the robot-steered needle had a significantly lower targeting error (about 3.5 millimeters) than the manual tool (about 13 millimeters).
“The results demonstrate the potential for improving the accuracy of medical procedures when using medical robots with autonomous capabilities,” said Alterovitz.
The researchers plan to test their robot next in human cadaver lungs, followed by live human trials. They also plan to fully automate the operation of the aiming device.
The researchers’ ultimate objective is to leverage the new technology to improve patient care. This study was funded in part by NIBIB (R01EB024864) and the National Science Foundation.
This science highlight describes a basic research finding. Basic research increases our understanding of human behavior and biology, which is foundational to advancing new and better ways to prevent, diagnose, and treat disease. Science is an unpredictable and incremental process—each research advance builds on past discoveries, often in unexpected ways. Most clinical advances would not be possible without the knowledge of fundamental basic research.
Study Reference: Alan Kuntz et al. Autonomous medical needle steering in vivo. Science Robotics (2023). Doi/10.1126/scirobotics.adf7614

